ELM401 查看數據表(PDF) - Elm Electronics
零件编号
产品描述 (功能)
生产厂家
ELM401 Datasheet PDF : 8 Pages
| |||
ELM401
Debouncing Circuits
Any time that two metal surfaces meet, as they do
inside a rotary encoder, there will be a tendency for
the moving one to bounce, which causes the electrical
connection to make and break. The duration of this
bouncing action may be very short, but it is usually fast
enough to cause multiple counts to be recorded by
connected electronic circuits. As the number of
bounces can not be predicted, a means of removing
them is necessary. Circuits that remove the bounce
are usually called ‘debouncing’ circuits.
Many debouncing circuits employ a simple timer to
determine if an input is stable. This generally works
well if the two contacts meet and then remain still. With
a rotary encoder however, one of the contacts meets
the other then usually continues sliding over the
surface of the stationary contact. This will produce
noise while the contact is sliding, occasionally enough
to make it look like there are more inputs.
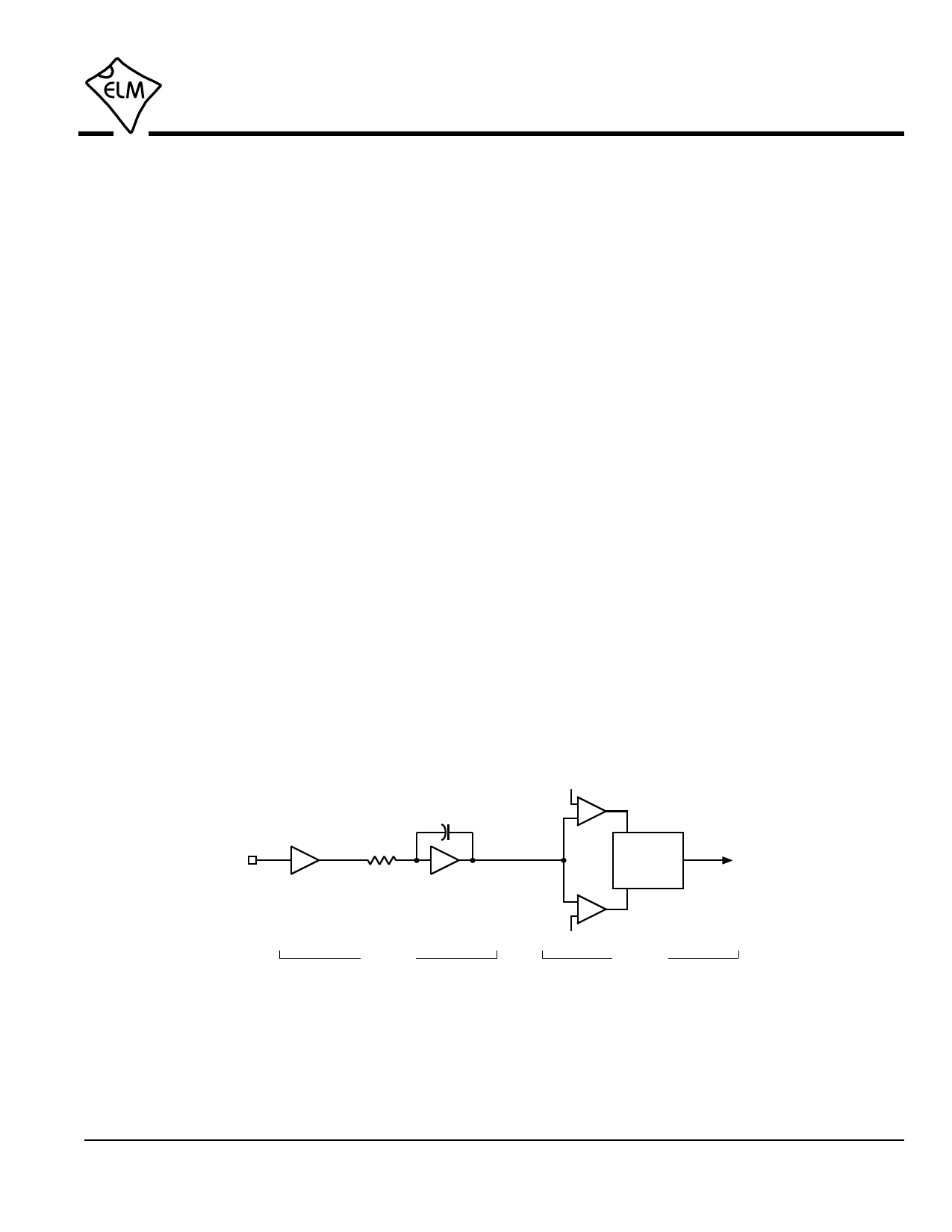
The ELM401 employs a two stage system to
remove the bounce and the sliding noise from the
encoder signal. A block diagram of the stages are
shown in figure 3. The first stage is a digital filter circuit
that is used to determine the average value of the
waveform over a time. If a long enough time is chosen,
short duration pulses will have little effect on the
overall average. If the time chosen is too long,
however, the circuit will be slow to respond, and may
in fact average out some legitimate inputs. Choosing
the time period (or time constant of the circuit) is thus
very important in determining how effective the filtering
function will be. We have found that with typical rotary
encoder specifications (usually 3.0 msec of bounce or
noise, maximum), the ELM401 debounce circuit works
quite well.
After the signal has been filtered, it is compared to
some reference levels, and the output of these
comparators are used to control a simple timer. The
timer is used to ensure that the output of the filter is
stable, and not just a momentary transient, while the
use of two comparator levels provides hysteresis, so
that some variation in the filter output can be tolerated.
The Sw input uses a very simple debounce circuit
that employs a timer only (and not the filter section
shown in Figure 3). This is very similar to the logic
used by our ELM409, ELM410, and ELM411 circuits.
Once the signals from the rotary encoder have
been debounced, they may be used by your circuit to
decode direction, etc.- the following sections provide
some tips on this.
rotary
encoder
input
tc = 1.7 msec
3 msec
timer
filter
timer
Figure 3. Internal Debouncing Logic
to
output
logic
ELM401DSB
Elm Electronics – Circuits for the Hobbyist
www.elmelectronics.com
6 of 8
Share Link: 